機械臂套件YFA01
出自YFRobotwiki
在2021年8月13日 (五) 13:45由
Allblue
(
對話
|
貢獻
)
所做的修訂版本
(
差異
)
←上個修訂
|
最新修訂
(
差異
) |
下一修訂→
(
差異
)
跳轉到:
導覽
、
搜尋
Right
機械臂組裝
組裝機械臂前,舵機必須進行測試及歸中處理。否則導致返工甚至堵轉損壞。
機械臂組裝手冊
機械臂注意事項
Arduino編程PS2手臂遙控款機械臂,注意事項:
程序執行必須連接PS2手柄接收器,否則進入無限循環等待。
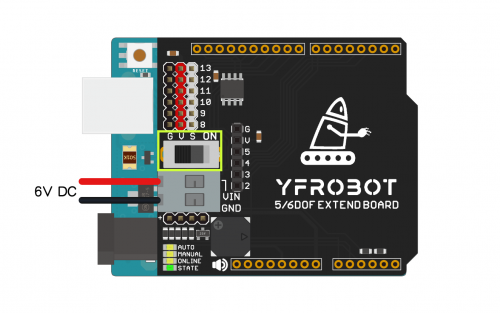
更新程序時,請務必關閉舵機電源開關,否則可能出現機械臂亂轉現象。
程序下載完畢,等待蜂鳴器間隔響、LED間隔閃爍時,打開電源。
打開舵機電源開關前,請盡量保持機械臂靠近如圖位置,這樣可以減少舵機的行程,避免過大擺動。
機械臂功能演示
機械臂功能演示視頻
*
機械臂功能演示視頻
訪問YFRobot論壇
論壇邀請碼獲取
技術交流群
淘寶企業店
淘寶直營店
聯繫我們
導航
個人工具
登入
名字空間
頁面
討論
台灣正體
變換
不转换
简体
繁體
大陆简体
香港繁體
澳門繁體
大马简体
新加坡简体
台灣正體
檢視
閱讀
檢視原始碼
檢視歷史
動作
搜尋
導覽
首頁
YF-论坛提问
YFRobot-直营店
YFRobot-企业店
Arduino
Arduino之入门篇
Arduino入门教程
Arduino语法参考
Arduino库
Arduino核心代码
编程平台
Mixly库
Mind+库
MakeCode扩展
传感器系列
积木式传感器系列
黑板传感器系列
蓝板传感器系列
Micro:Bit
Micro:Bit 通用基础教程
Valon智能车
Valon-I
帮助
使用說明
wiki语法参考
工具箱
連入頁面
相關頁面修訂記錄
特殊頁面
可列印版
永久連結
頁面資訊