机械臂套件YFA01
来自YFRobotwiki
2021年8月13日 (五) 13:44
Allblue
(
讨论
|
贡献
)
的版本
(
差异
)
←上一版本
|
最后版本
(
差异
) |
下一版本→
(
差异
)
跳转至:
导航
、
搜索
Right
机械臂组装
组装机械臂前,舵机必须进行测试及归中处理。否则导致返工甚至堵转损坏。
机械臂组装手册
机械臂注意事项
Arduino编程PS2手臂遥控款机械臂,注意事项:
程序执行必须连接PS2手柄接收器,否则进入无限循环等待。
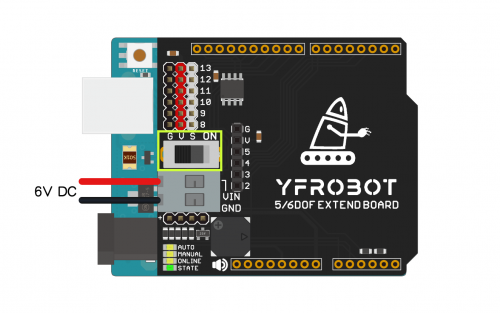
更新程序时,请务必关闭舵机电源开关,否则可能出现机械臂乱转现象。
程序下载完毕,等待蜂鸣器间隔响、LED间隔闪烁时,打开电源。
打开舵机电源开关前,请尽量保持机械臂靠近如图位置,这样可以减少舵机的行程,避免过大摆动。
机械臂功能演示
机械臂功能演示视频
机械臂功能演示视频
访问YFRobot论坛
论坛邀请码获取
技术交流群
淘宝企业店
淘宝直营店
联系我们
导航菜单
个人工具
登录
名字空间
页面
讨论
简体
变种
不转换
简体
繁體
大陆简体
香港繁體
澳門繁體
大马简体
新加坡简体
台灣正體
查看
阅读
查看源代码
查看历史
操作
搜索
导航
首页
YF-论坛提问
YFRobot-直营店
YFRobot-企业店
Arduino
Arduino之入门篇
Arduino入门教程
Arduino语法参考
Arduino库
Arduino核心代码
编程平台
Mixly库
Mind+库
MakeCode扩展
传感器系列
积木式传感器系列
黑板传感器系列
蓝板传感器系列
Micro:Bit
Micro:Bit 通用基础教程
Valon智能车
Valon-I
帮助
帮助
wiki语法参考
工具箱
链入页面
相关更改
特殊页面
打印版本
永久链接
页面信息