LEGO-摇杆模块:修訂版本之間的差異
從 YFRobotwiki
(→电路连接示意图) |
(→规格参数) |
||
| 第 14 行: | 第 14 行: | ||
*信号类型:模拟输入 | *信号类型:模拟输入 | ||
*接口类型:PH2.0-4P | *接口类型:PH2.0-4P | ||
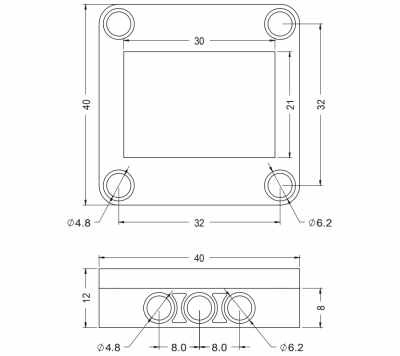
| + | *外形尺寸:[[Image:乐高兼容模块外壳尺寸.png|400px]] | ||
=== 引脚说明 === | === 引脚说明 === | ||
2021年5月12日 (三) 13:37的修訂版本
創建縮圖錯誤: 檔案似乎遺失:
目錄
產品簡介
LEGO搖桿模塊採用優質搖桿設計製作,其具有X、Y軸兩路模擬輸出,可以實現控制舵機轉動或其他。
LEGO搖桿模塊具有統一的兼容樂高積木的外殼,可輕鬆實現樂高積木的拼接,實現創意設計。
規格參數
- 供電電壓:DC3.3V~5V
- 信號類型:模擬輸入
- 接口類型:PH2.0-4P
- 外形尺寸:

引腳說明
創建縮圖錯誤: 檔案似乎遺失:
應用示例
示例需要硬件:
- Arduino UNO
- Arduino UNO 專用擴展板
- 搖桿模塊
- 線材
電路連接示意圖
搖桿模塊的 G、V、X、Y分別連接 Arduino UNO的GND、VCC、A1、A0引腳。
創建縮圖錯誤: 檔案似乎遺失:
Arduino IDE示例代碼
const int XPin = A1; const int YPin = A0; void setup() { Serial.begin(9600); } void loop() { Serial.print("XValue:"); Serial.print(analogRead(XPin)); Serial.print("\tYValue:"); Serial.println(analogRead(YPin)); delay(30); } |
Mixly示例代碼創建縮圖錯誤: 檔案似乎遺失:
|
Mind+示例代碼
創建縮圖錯誤: 檔案似乎遺失:
|
程序運行結果
當搖桿動作有變化時,輸出相應數據,如下圖:
{kind=link}
| 訪問YFRobot論壇 | 論壇邀請碼獲取 | 技術交流群 |
| 淘寶企業店 | 淘寶直營店 | 聯繫我們 |