“颜色传感器-VEML6040”的版本间的差异
来自YFRobotwiki
| 第1行: | 第1行: | ||
<img src="http://file.yfrobot.com.cn/wiki/image/veml%E9%A2%9C%E8%89%B2%E4%BC%A0%E6%84%9F%E5%99%A8.png" style="float:right; margin: 15px;" width="15%" alt="MicroBitExb_V2"/> | <img src="http://file.yfrobot.com.cn/wiki/image/veml%E9%A2%9C%E8%89%B2%E4%BC%A0%E6%84%9F%E5%99%A8.png" style="float:right; margin: 15px;" width="15%" alt="MicroBitExb_V2"/> | ||
| − | |||
| − | |||
| − | |||
=== 产品简介 === | === 产品简介 === | ||
| − | + | 颜色传感器, 采 用VEML6040颜色传感器 芯片设计 制作。通过I2C总线接口通信 , 可提供红光 、 绿光 、 蓝光和白光 的 检测与输出 。 | |
| − | + | 芯片采 用 FiltronTM 技术实现了对红色、绿色和蓝色 通 道每个请求波段的中间的准确响应。此外 , 它还提供出色的温度补偿,在不断变化的温度下保持输出 稳定 。 | |
| + | 颜色传感器具有统一的兼容乐高积木的外壳, 可 轻松完成乐高积木 的 拼接,实现创意设计 。 | ||
| − | + | 重要提示:颜色 的 识别与环境 的 色温、亮度 , 被测物体 的 材质 , 检测距离、角度都有关联;如发 现 检测颜色结果与实际有差别属于正常情况,可以通过更换检测材料、测量距离等测试条件进行调节;或者通过优化程序来调节输出结果,可以参考:为什么我的颜色传感器不准确?颜色传感器的正确使用方法? | |
| 第20行: | 第18行: | ||
=== 规格参数 === | === 规格参数 === | ||
*工作电压:3.3-5V | *工作电压:3.3-5V | ||
| − | * | + | *IC:VEML6040 |
| − | + | *通信方式:I2C ,地址0x10 | |
| − | *通信方式:I2C | + | * 检测 距离 :1cm |
| − | * | + | * 每个通道(R、G、B、W)提供 16 位分辨率 |
| − | * | + | *最大检测范围(515.4、1031、2062、4124、8248 或 16496)勒克斯,最高灵敏度为 0.007865 勒克斯/步 |
2023年5月23日 (二) 21:24的版本

产品简介
颜色传感器,采用VEML6040颜色传感器芯片设计制作。通过I2C总线接口通信,可提供红光、绿光、蓝光和白光的检测与输出。
芯片采用 FiltronTM 技术实现了对红色、绿色和蓝色通道每个请求波段的中间的准确响应。此外,它还提供出色的温度补偿,在不断变化的温度下保持输出稳定。 颜色传感器具有统一的兼容乐高积木的外壳,可轻松完成乐高积木的拼接,实现创意设计。
重要提示:颜色的识别与环境的色温、亮度,被测物体的材质,检测距离、角度都有关联;如发现检测颜色结果与实际有差别属于正常情况,可以通过更换检测材料、测量距离等测试条件进行调节;或者通过优化程序来调节输出结果,可以参考:为什么我的颜色传感器不准确?颜色传感器的正确使用方法?
产品PDF文档
规格参数
- 工作电压:3.3-5V
- IC:VEML6040
- 通信方式:I2C,地址0x10
- 检测距离:1cm
- 每个通道(R、G、B、W)提供 16 位分辨率
- 最大检测范围(515.4、1031、2062、4124、8248 或 16496)勒克斯,最高灵敏度为 0.007865 勒克斯/步
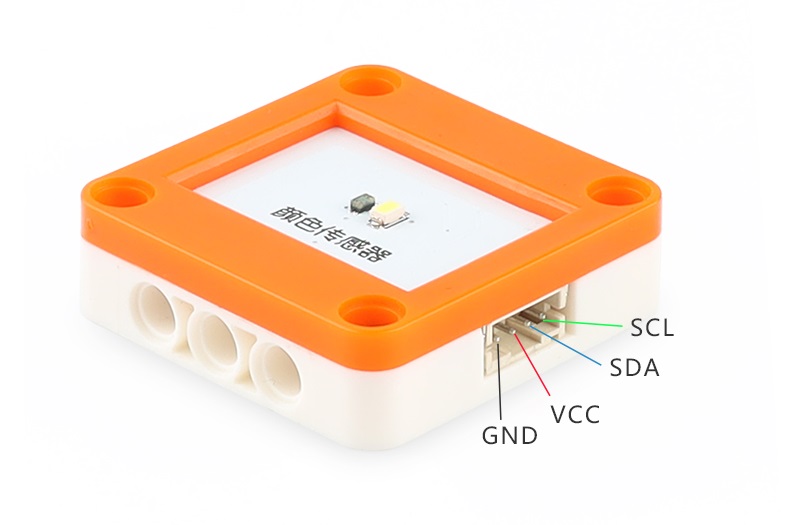
引脚图
Arduino 应用示例
应用领域
智能锁,刷卡系统...
参考资料
| 返回首页 | 访问YFRobot论坛 | 技术交流群 |
| 淘宝企业店 | 淘宝直营店 | 联系我们 |