|
|
| 第 28 行: |
第 28 行: |
| | | | |
| | ---- | | ---- |
| − |
| |
| − | {| border="0" cellpadding="5" width="100%"
| |
| − | |width="33%" valign="top" align="center" bgcolor=#d3d7d4 style="border-radius:5px;"|''' [http://www.yfrobot.com.cn 访问YFRobot论坛]'''
| |
| − | |width="33%" valign="top" align="center" bgcolor=#d3d7d4 style="border-radius:5px;"|''' [http://www.yfrobot.com.cn/thread-2235-1-1.html 论坛邀请码获取]'''
| |
| − | |width="33%" valign="top" align="center" bgcolor=#d3d7d4 style="border-radius:5px;"|'''[https://jq.qq.com/?_wv=1027&k=466mOjv 技术交流群]'''
| |
| − | |}
| |
| − |
| |
| − | {| border="0" cellpadding="5" width="100%"
| |
| − | |width="33%" valign="top" align="center" bgcolor=#d3d7d4 style="border-radius:5px;"|''' [http://yfanmcu.taobao.com 淘宝企业店]'''
| |
| − | |width="33%" valign="top" align="center" bgcolor=#d3d7d4 style="border-radius:5px;"|''' [http://yfrobot.taobao.com 淘宝直营店]'''
| |
| − | |width="33%" valign="top" align="center" bgcolor=#d3d7d4 style="border-radius:5px;"| <font size="+1">'''[[联系我们]]'''</font>
| |
| − | |}
| |
2021年8月13日 (五) 13:47的修訂版本
機械臂組裝
組裝機械臂前,舵機必須進行測試及歸中處理。否則導致返工甚至堵轉損壞。
機械臂組裝手冊
機械臂注意事項
Arduino編程PS2手臂遙控款機械臂,注意事項:
- 程序執行必須連接PS2手柄接收器,否則進入無限循環等待。
- 更新程序時,請務必關閉舵機電源開關,否則可能出現機械臂亂轉現象。
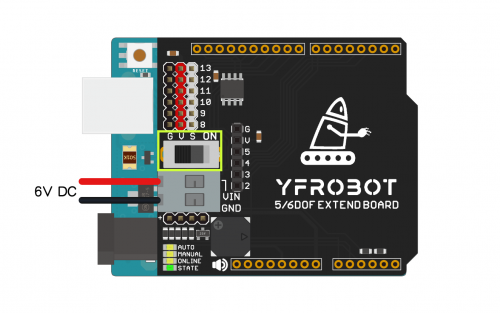
- 程序下載完畢,等待蜂鳴器間隔響、LED間隔閃爍時,打開電源。
- 打開舵機電源開關前,請盡量保持機械臂靠近如圖位置,這樣可以減少舵機的行程,避免過大擺動。

機械臂功能演示


