“红外接收”的版本间的差异
| (未显示2个用户的30个中间版本) | |||
| 第1行: | 第1行: | ||
| − | [[Image:红外接收.jpg| | + | [[Image:红外接收.jpg|300px|thumb|红外接收]] |
| 第6行: | 第6行: | ||
=== 产品简介 === | === 产品简介 === | ||
<br> | <br> | ||
| − | 红外接收模块,采用HS0038一体化红外遥控接收元件, | + | 红外遥控分发射和接收两部分,发射部分为Mini遥控器,接收部分为 红外接收模块, 红外接收模块 采用HS0038一体化红外遥控接收元件, 载波 频率为38.0kHz, 周期26us,可抗 自然光的反射干扰。 |
| + | 红外系统原理框图如下,Mini遥控器编码调制发出红外线,接收模块将接收到的红外线遥控信号,经过放大、解调和整形后输出功能指令信号,送至微处理器进行识别和处理,从而实现遥控过程。 | ||
| + | |||
| + | [[File:红外系统框图.png|600px]] | ||
| + | |||
| + | <img src="http://yfrobot.gitee.io/YFRobot/wiki/img/红外遥控系统.gif" alt="红外"> | ||
| + | |||
| + | |||
| + | 其他详见参考资料。 | ||
=== 规格参数 === | === 规格参数 === | ||
<br> | <br> | ||
| − | *供电电压 | + | *供电电压 :DC3v3-5V |
| − | * | + | * 红外协议:NEC |
| + | *载波频率 :38 kHz | ||
*周期:26μs | *周期:26μs | ||
| + | *接收距离:10m | ||
*安装孔径:3MM | *安装孔径:3MM | ||
| − | *模块尺寸:28*21*11MM(长*宽*高) | + | *模块尺寸:28*21*11MM (长*宽*高)/ Mini遥控器:88*40*7MM (长*宽*高) |
*孔间距:15MM | *孔间距:15MM | ||
| − | *模块重量:2. | + | *模块重量:2.2g / Mini遥控器:12.6g |
| − | + | ||
| − | + | ||
=== 主要应用 === | === 主要应用 === | ||
| 第36行: | 第44行: | ||
=== 应用示例 === | === 应用示例 === | ||
<br> | <br> | ||
| − | :'''电路连接 | + | <font color="darkorenge">''' 提示'''</font>:以下程序需使用到 IRremote库文件,文件下载地址见页末 - 参考资料。下载后将其解压至arduinoIDE安装目录/libraries文件夹中,例如: "D:\Program Files\Arduino\arduino-1.6.4-windows\arduino-1.6.4\libraries"。 |
| + | <br><br> | ||
| + | '''电路连接''' | ||
| + | |||
<br> | <br> | ||
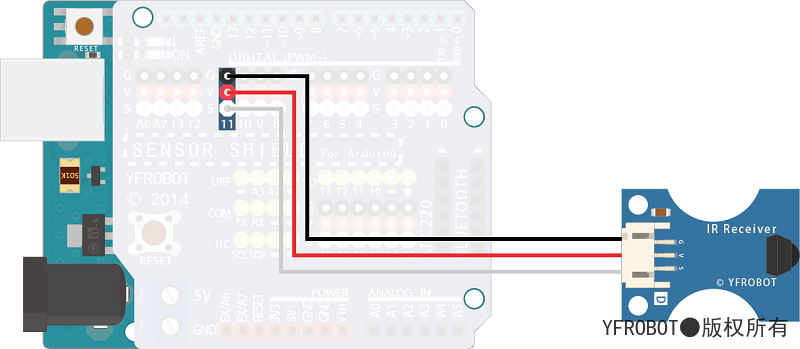
| − | + | :'''红外接收模块'''的 G、V、S分别连接 '''Arduino UNO'''的GND、VCC(+5V)、D11引脚。 | |
| − | + | '''电路连 接 示意 图''' | |
| − | + | ||
| + | <!-- <img src="http://yfrobot.gitee.io/wiki/img/红外遥控.png" alt="红外遥控" /> --> | ||
| + | <img src="http://file.yfrobot.com.cn/wiki/image/sensor_circuit/IRReceiver.png-yf" alt="红外遥控" /> | ||
| − | + | ||
| − | <br> | + | |
| + | '''示例代码''' | ||
| + | <br><br> | ||
<font color="darkcyan">'''示例一'''</font>:获取键值 | <font color="darkcyan">'''示例一'''</font>:获取键值 | ||
| − | < | + | <source lang="c"> |
/* | /* | ||
* IRremote: IRrecvDemo - demonstrates receiving IR codes with IRrecv | * IRremote: IRrecvDemo - demonstrates receiving IR codes with IRrecv | ||
| 第79行: | 第93行: | ||
} | } | ||
} | } | ||
| − | </ | + | </source> |
| − | 程序下载地址:[ | + | 程序下载地址:[https://eyun.baidu.com/s/3hsQn8zi IRrecvDemo] |
| + | |||
| + | 程序运行结果:接收按键值,并串口打印。出现 "FFFFFFFF" 码值,属于正常现象,它是当收到重复码(长按)时NEC的解码值。 | ||
| + | |||
| + | '''NEC重复码''' | ||
| + | |||
| + | 对于重复发射(按钮按住),解码代码将一次次的返回相同的解码值。唯一的例外是NEC,会重复发射一个特殊的代码,而不是重复的发射该按键编码值。因此, 解码程序返回一个特殊REPEAT值(NEC默认返回值为0xFFFFFFFF,用户也可以在库中进行修改)。 | ||
| + | |||
| + | [[File:NEC重复码定义.png|600px]] | ||
| + | |||
| − | |||
最终整理按键值表格: | 最终整理按键值表格: | ||
| 第146行: | 第168行: | ||
<font color="darkcyan">'''示例二'''</font>:红外遥控 | <font color="darkcyan">'''示例二'''</font>:红外遥控 | ||
| − | < | + | <source lang="c"> |
| − | / | + | // Infrared remote control test |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
#include <IRremote.h> | #include <IRremote.h> | ||
int RECV_PIN = 11; | int RECV_PIN = 11; | ||
| + | int LED_PIN = 13; | ||
IRrecv irrecv(RECV_PIN); | IRrecv irrecv(RECV_PIN); | ||
| 第166行: | 第183行: | ||
{ | { | ||
Serial.begin(9600); | Serial.begin(9600); | ||
| + | pinMode(LED_PIN,OUTPUT); | ||
irrecv.enableIRIn(); // Start the receiver | irrecv.enableIRIn(); // Start the receiver | ||
} | } | ||
| 第171行: | 第189行: | ||
void loop() { | void loop() { | ||
if (irrecv.decode(&results)) { | if (irrecv.decode(&results)) { | ||
| − | |||
Serial.println(results.value, HEX); | Serial.println(results.value, HEX); | ||
| − | + | controlLED(&results); | |
irrecv.resume(); // Receive the next value | irrecv.resume(); // Receive the next value | ||
} | } | ||
} | } | ||
| − | |||
| − | |||
| − | 程序 | + | //Control the LED |
| + | void controlLED(decode_results *results) { | ||
| + | switch(results->value){ | ||
| + | case 0xFFA25D: | ||
| + | digitalWrite(LED_PIN,LOW); | ||
| + | break; | ||
| + | case 0xFFE21D: | ||
| + | digitalWrite(LED_PIN,HIGH); | ||
| + | break; | ||
| + | } | ||
| + | } | ||
| + | </source> | ||
| + | 程序 下载地址 :[https://eyun.baidu.com/s/3pLQFnQz IRrecvControl] | ||
| + | 程序运行结果:按“MENU”按钮,点亮LED,按下“关闭”按钮,关闭LED。 | ||
| 第187行: | 第215行: | ||
===参考资料=== | ===参考资料=== | ||
<br> | <br> | ||
| − | * [ | + | * [https://yfrobot.gitee.io/wiki/lib/Arduino-IRremote-master.zip Arduino-IRremote-master库文件],[https://yfrobot.lanzoui.com/irjjssaf2uf Arduino-IRremote-master库文件] |
| − | * [http:// | + | *<strike> [https://eyun.baidu.com/s/3dF2Ddex IRremote库文件]</strike> |
| + | * [http://yfrobot.gitee.io/wiki/doc/HS0038B.pdf HS0038B] | ||
| + | * [https://eyun.baidu.com/s/3hstJ61Q 红外原理简介] | ||
| + | * [https://eyun.baidu.com/s/3c4lGmfY HS0038红外接受电路设计与应用] | ||
| + | * [https://eyun.baidu.com/s/3nwKZxjj 红外遥控系统原理图解] | ||
2023年2月17日 (五) 17:28的最后版本

产品简介
红外遥控分发射和接收两部分,发射部分为Mini遥控器,接收部分为红外接收模块,红外接收模块采用HS0038一体化红外遥控接收元件,载波频率为38.0kHz,周期26us,可抗自然光的反射干扰。
红外系统原理框图如下,Mini遥控器编码调制发出红外线,接收模块将接收到的红外线遥控信号,经过放大、解调和整形后输出功能指令信号,送至微处理器进行识别和处理,从而实现遥控过程。


其他详见参考资料。
规格参数
- 供电电压:DC3v3-5V
- 红外协议:NEC
- 载波频率:38 kHz
- 周期:26μs
- 接收距离:10m
- 安装孔径:3MM
- 模块尺寸:28*21*11MM(长*宽*高)/ Mini遥控器:88*40*7MM(长*宽*高)
- 孔间距:15MM
- 模块重量:2.2g / Mini遥控器:12.6g
主要应用
广泛应用于:空调、风扇、暖风机、加湿器、电视、DVD、机顶盒、车载移动DVD、硬盘播放器、多媒体组合音响、数码相框、手机等家电产品,电脑及周边设备,感应洁具,仪表,工业自动化,遥控玩具,通讯器材,照相器材,事务机器,金融电子,汽车电子,灯饰照明等领域。
引脚说明
- 1. G -- Gnd(地)
- 2. V -- Vcc(电源+5V)
- 3. S -- Sign(信号)
应用示例
提示:以下程序需使用到 IRremote库文件,文件下载地址见页末 - 参考资料。下载后将其解压至arduinoIDE安装目录/libraries文件夹中,例如: "D:\Program Files\Arduino\arduino-1.6.4-windows\arduino-1.6.4\libraries"。
电路连接
- 红外接收模块的 G、V、S分别连接 Arduino UNO的GND、VCC(+5V)、D11引脚。
电路连接示意图
示例代码
示例一:获取键值
/* * IRremote: IRrecvDemo - demonstrates receiving IR codes with IRrecv * An IR detector/demodulator must be connected to the input RECV_PIN. * Version 0.1 July, 2009 * Copyright 2009 Ken Shirriff * http://arcfn.com */ #include <IRremote.h> int RECV_PIN = 11; IRrecv irrecv(RECV_PIN); decode_results results; void setup() { Serial.begin(9600); irrecv.enableIRIn(); // Start the receiver } void loop() { if (irrecv.decode(&results)) { Serial.print("irCode: "); Serial.println(results.value, HEX); delay(200); irrecv.resume(); // Receive the next value } }
程序下载地址:IRrecvDemo
程序运行结果:接收按键值,并串口打印。出现 "FFFFFFFF" 码值,属于正常现象,它是当收到重复码(长按)时NEC的解码值。
NEC重复码
对于重复发射(按钮按住),解码代码将一次次的返回相同的解码值。唯一的例外是NEC,会重复发射一个特殊的代码,而不是重复的发射该按键编码值。因此, 解码程序返回一个特殊REPEAT值(NEC默认返回值为0xFFFFFFFF,用户也可以在库中进行修改)。

最终整理按键值表格:
| 遥控器字符 | 键值 | 遥控器字符 | 键值 |
| 红色/关闭键 | 0xFFA25D | MENU | 0xFFE21D |
| TEST | 0xFF22DD | + | 0xFF02FD |
| 返回键 | 0xFFC23D | 快退/左2三角 | 0xFFE01F |
| 播放/一个三角 | 0xFFA857 | 快进/右2三角 | 0xFF906F |
| 0 | 0xFF6897 | - | 0xFF9867 |
| C | 0xFFB04F | 1 | 0xFF30CF |
| 2 | 0xFF18E7 | 3 | 0xFF7A85 |
| 4 | 0xFF10EF | 5 | 0xFF38C7 |
| 6 | 0xFF5AA5 | 7 | 0xFF42BD |
| 8 | 0xFF4AB5 | 9 | 0xFF52AD |
示例二:红外遥控
// Infrared remote control test #include <IRremote.h> int RECV_PIN = 11; int LED_PIN = 13; IRrecv irrecv(RECV_PIN); decode_results results; void setup() { Serial.begin(9600); pinMode(LED_PIN,OUTPUT); irrecv.enableIRIn(); // Start the receiver } void loop() { if (irrecv.decode(&results)) { Serial.println(results.value, HEX); controlLED(&results); irrecv.resume(); // Receive the next value } } //Control the LED void controlLED(decode_results *results) { switch(results->value){ case 0xFFA25D: digitalWrite(LED_PIN,LOW); break; case 0xFFE21D: digitalWrite(LED_PIN,HIGH); break; } }
程序下载地址:IRrecvControl
程序运行结果:按“MENU”按钮,点亮LED,按下“关闭”按钮,关闭LED。
参考资料
- Arduino-IRremote-master库文件,Arduino-IRremote-master库文件
IRremote库文件- HS0038B
- 红外原理简介
- HS0038红外接受电路设计与应用
- 红外遥控系统原理图解
更多建议和问题欢迎反馈至 YFRobot论坛
购买方式:YFRobot 电子工作室